研究人员开发出优化自主船舶导航的新控制方法
船舶海上操纵的研究长期以来一直是航运界的焦点。随着远程控制、通信技术和人工智能的快速发展,海上自主水面舰艇(MASS)的概念已成为一种有前途的自主海上导航解决方案。这一转变凸显了对自主船舶操纵最优控制模型的需求日益增长。
设计用于高效船舶操纵的控制系统是自主船舶控制中最困难的挑战之一。虽然许多研究已经调查了这个问题并提出了各种控制方法,包括模型预测控制(MPC),但大多数研究都集中在平静水域的控制,这并不代表真实的操作条件。
在海上,船舶不断受到不同外部载荷的影响,其中海浪载荷是影响操纵性能的最重要因素。
为了解决这一差距,韩国海事与海洋大学导航融合研究部助理教授 Daejeong Kim 领导的一组研究人员为 MASS 设计了一种新颖的时间最优控制方法。“我们的控制模型考虑了作用在船上的各种力,使 MASS 能够在动态海况下更好地导航并跟踪目标,”Kim 博士说。他们的研究发表在《海洋工程》上。
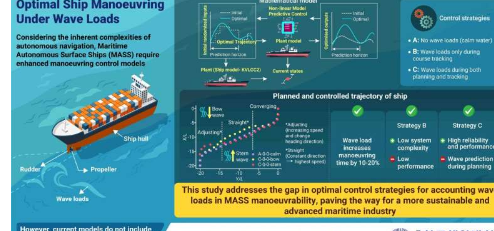
这种创新控制系统的核心是一个全面的数学船舶模型,该模型考虑了海洋中的各种力,包括作用在船体、螺旋桨和舵等船舶关键部件上的波浪载荷。然而,该模型不能直接用于优化机动时间。
为此,研究人员开发了一种新颖的时间优化模型,将数学模型从时间公式转换为空间公式。这成功地优化了操纵时间。
这两个模型被集成到非线性MPC控制器中以实现时间最优控制。他们通过模拟在不同波浪载荷的海上航行的真实船模来测试该控制器。
此外,为了有效进行航向规划和跟踪,研究人员提出了三种控制策略:策略A在规划和跟踪阶段排除波浪载荷,作为参考;策略 B 仅在规划阶段包括波浪载荷,策略 C 在两个阶段都包括波浪载荷,测量它们对推进和转向的影响。
实验表明,波浪载荷增加了策略 B 和 C 的预期操纵时间。比较这两种策略,研究人员发现策略 B 比策略 C 更简单,但性能较低,但后者更可靠。然而,策略 C 在规划阶段包含波浪载荷预测,从而给控制器带来了额外的负担。
“我们的方法提高了自主船舶运营的效率和安全性,并有可能降低运输成本和碳排放,使各个经济部门受益,”金博士强调了这项研究的潜力。“总的来说,我们的研究解决了自主船舶操纵方面的一个关键差距,这可能有助于技术更先进的海运业的发展。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
在众多紧凑型性能车中,大众高尔夫GTI始终以其独特的驾驶乐趣和经典形象占据着重要地位。对于预算有限但又追求...浏览全文>>
-
2022款的大众蔚揽以其优雅的设计和出色的性能在市场上占据了一席之地。对于预算在20-30万元之间的消费者来说,...浏览全文>>
-
池州长安启源E07作为一款备受关注的新能源SUV,在市场上拥有较高的关注度。这款车型凭借其时尚的设计和丰富的...浏览全文>>
-
近年来,随着汽车市场的竞争愈发激烈,各大品牌纷纷推出优惠政策以吸引消费者。作为国内知名汽车品牌之一,蚌...浏览全文>>
-
菱势汽车的菱势电卡是一款新能源物流车,如果您想预约试驾这款车型,以下是可能的流程及注意事项:预约试驾流...浏览全文>>
-
奥迪e-tron GT是一款融合了豪华与科技的电动跑车,如果您对这款车型感兴趣并希望进行试驾体验,可以通过以下...浏览全文>>
-
试驾五菱扬光是一次非常有趣的体验。以下是从咨询到试驾的完整体验过程:咨询阶段1 信息获取:首先通过官方...浏览全文>>
-
在试驾丰田bZ3C时,享受4S店专业服务的关键在于提前做好准备,并充分利用4S店提供的各项资源。以下是一些具体...浏览全文>>
-
近年来,新能源汽车市场蓬勃发展,各大品牌纷纷推出全新车型以满足消费者需求。作为大众汽车旗下备受关注的新...浏览全文>>
-
作为一款备受关注的新能源车型,2022款亳州迈腾GTE在市场上的表现一直引人注目。近期,其最低落地价已降至18 ...浏览全文>>
- 蚌埠揽巡最新价格2024款走势,市场优惠力度持续加大
- 亳州迈腾GTE多少钱 2022款落地价走势,近一个月最低售价18.79万起,性价比凸显
- 安庆探影多少钱?价格解读
- 天津滨海高尔夫GTI最新价格2025款,各车型售价大公开,性价比爆棚
- 试驾奕泽IZOA,感受豪华与科技的完美融合
- 五菱E5试驾预约操作指南
- ARCFOX极狐极狐 阿尔法S6试驾有哪些途径
- 奔腾T55预约试驾有哪些途径
- 东风风度帕拉丁试驾,开启完美驾驭之旅
- 试驾腾势N7,一键搞定,开启豪华驾驶之旅
- 开沃D10多少钱?经销商报价及市场优惠情况
- 飞度新款价格2025款多少钱?如何挑选性价比高的车
- 东莞途锐 2025新款价格全解买车必看
- 试驾东风小康EC36 II的流程及注意事项
- 北京BJ30预约试驾预约流程
- 奥迪A6(进口)试驾预约,从咨询到试驾的完整体验
- 东风本田M-NV试驾全攻略
- 欧拉芭蕾猫落地价全解,买车必看的省钱秘籍
- 龙耀8L新车报价2022款,各配置车型售价全解析
- 沃尔沃S60新能源多少钱 2024款落地价实惠,配置丰富,不容错过